
Naviguer dans l’espace

Les différentes antennes du système Kours-NA sur l'avant du vaisseau Soyouz.
Nous en avons déjà un peu parlé ici avec le développement annoncé du système pour le vaisseau Orël. Voici l'intégralité d'un article publié par Roussky Kosmos.
Déjà au début de l'ère des vols habités, les ingénieurs ont commencé à réfléchir à la création d'un système qui, en mode autonome, aiderait les engins spatiaux à se retrouver dans l'immensité de l'espace. Aujourd'hui, le système Kours joue le rôle d'un pilote automatique lors de l'approche et de l'amarrage des vaisseaux à l'ISS. Igor Afanasyev a parlé de ses caractéristiques, de l'histoire de sa création et des cas d'échec, y compris non confirmés, avec Sergei Medvedev, concepteur en chef de systèmes radiotechniques pour les mesures mutuelles, Institut de recherche scientifique de TP (NII TP qui fait partie de la société d'État "Roscosmos").
Tout comme le cerveau commande le corps, recevant des informations "d'entrée" des sens, le système de contrôle du vaisseau spatial comprend des moteurs et d'autres unités, traitant les données des capteurs et des instruments. L'organe sensoriel le plus important des vaisseaux nationaux russes est le système radio Kours pour les mesures mutuelles. Il commence à fonctionner à une distance de 150 à 200 km après avoir corrigé l'orbite de l'engin spatial, assurant une recherche et un rendez-vous automatiques avec la station orbitale, et termine sa mission au moment de l'amarrage.
À propos du système "Igla" [aiguille"]
"Kours" est la deuxième génération de systèmes automatiques de rendez-vous et d'amarrage. Le premier était Igla, qui a été utilisé de 1967 à 1989 lors de l'amarrage du vaisseau spatial Soyouz, ainsi que des vols vers les stations Salyut et Mir. L'un des inconvénients du système était que les kits d'Igla nécessitaient l'installation de plusieurs antennes sur les engins spatiaux.

Soyouz et la station Salyout. En encart les différents éléments du système de rendez-vous Igla.
Selon les mémoires de Boris Chertok, concepteur en chef adjoint du Korolyov à l'OKB-1:
"cinq antennes différentes ont été ouvertes après la mise en orbite du vaisseau spatial uniquement pour le Igla, et dans l'ensemble, tant d'équipements radio différents ont été installé sur le premier Soyouz que 20 antennes étaient nécessaires... mis à part le nombre d'antennes, Sergueï Pavlovitch [Korolyov] trouvait la structure metallique compliquée qui... servait à protéger les antennes réceptrices d'Igla du signal radio réfléchi par la coque du vaisseau".
L'élément clé du système était un radar basé sur la tête autodirectrice radar d'un missile air-air et non conçu pour une longue portée. Le vaisseau actif devait être à une distance ne dépassant pas 25 km du navire passif, où il se rendait pour l'amarrage par la méthode d'approche parallèle. D'autres inconvénients de "Igla" étaient la complexité, le poids, les dimensions et la consommation d'énergie importants, ainsi qu'une fiabilité insuffisante en raison du manque de redondance.
Par exemple, en raison d'erreurs et de pannes d'Igla, l'amarrage du Soyouz-15 avec la station Salyut-3 (août 1974) et du Soyouz-23 avec la station Salyut-5 (octobre 1976) a échoué.
Afin d'éliminer les lacunes inhérentes à Igla, le développement du système de mesures mutuelles « Mera» [Mesure] a commencé à la fin des années 1970, et a été utilisé dans le programme Saliout-7. Et en 1979, sur la base de la grille de fréquences élaborée de ce système, des spécialistes ont commencé à créer une nouvelle génération d'équipements, appelée "Kours". Un système moderne et fiable avec une précision de mesure élevée et une longue durée de vie dans des conditions spatiales, équipé d'un système de contrôle intégré, était requis. La méthode d'approche parallèle a été remplacée par une méthode de trajectoire libre beaucoup plus optimale et économique (en termes de consommation de carburant), qui supposait également une augmentation notable de la portée et de la précision des mesures.
Les déficiences inhérentes à l'Igla ont été éliminées, et le premier amarrage automatique du Soyouz TM-1 équipé du Kours avec la station orbitale Mir a eu lieu le 23 mai 1986.

La station spatiale MIR.
Difficultés de production
Quelques années seulement après l'effondrement de l'Union soviétique et la rupture des liens de coopération, les « Kours », comme beaucoup d'autres choses dans le pays, étaient rares. Il y avait une menace d'interruption des vols vers Mir. Malgré le fait qu'à un moment donné, RKK Energuya a commandé un grand nombre d'exemplaires au fabricant, au milieu des années 90, l'usine de radio de Kiev s'est retrouvée dans une situation très difficile et n'a pas assuré les livraisons.
Au début du programme russo-américain Mir-Shuttle, la situation était devenue si grave que la direction du programme spatial national a dû négocier avec la NASA pour qu'on renvoie l'équipement Kours sur les navettes pour réutilisation. Les exemplaires qui ont fonctionné dans le cadre de Soyouz et Progress et ont été libérés après l'amarrage avec Mir ont été ramenés sur Terre et reconditionnés sur Terre puis placés sur des vaisseaux se préparant au lancement. Ainsi, environ 40 ensembles d'équipements ont été retournés.
Vers 1999, le chef du Rosaviakosmos formé peu de temps auparavant, Youri Koptev, a signé la décision de lancer la production de "Kours" en Russie.
Passage au "numérique"
Aujourd'hui, les sondes vaisseaux Soyouz MS et Progress MS, qui accostent régulièrement à l'ISS, utilisent la version de troisième génération du Kours avec l'extension NA (« new active »). Il est installé sur les vaisseaux en mode normal depuis avril 2014.

Schématisation du système Kours-NA sur Soyouz MS.
"Kours-NA" est une version numérique, utilisant un amplificateur radiofréquence compact, numérisant et traitant les données dans un puissant ordinateur à trois processeurs. L'équipement est construit sur la base d'éléments domestiques, offre une précision de mesure plus élevée, est deux fois plus léger et trois fois plus économe en énergie que le précédent.

Schématisation du système Kours-NA sur Soyouz MS. Antennes directionnelles.

Schématisation du système Kours-NA sur Soyouz MS. Antenne d'orientation.
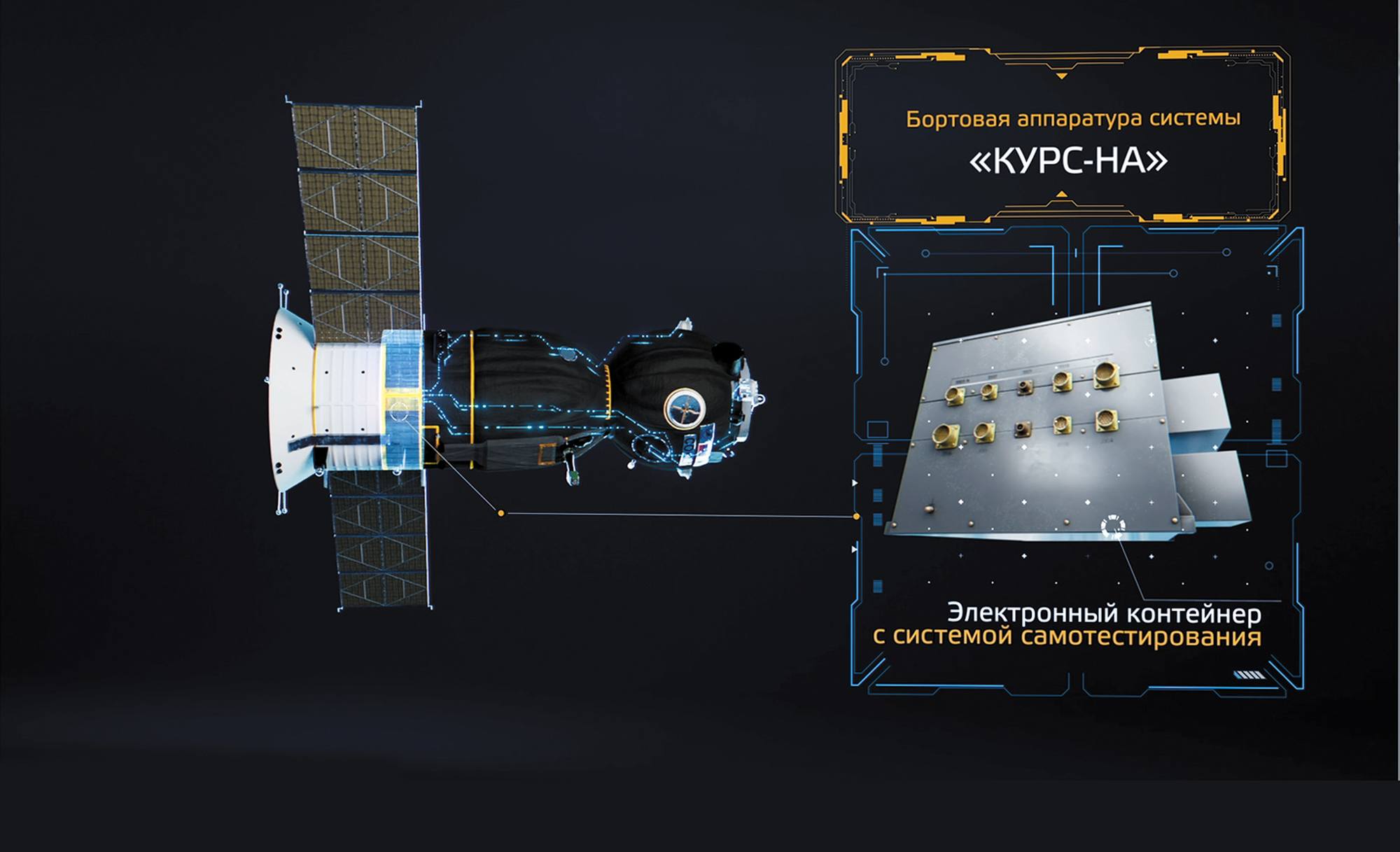
Schématisation du système Kours-NA sur Soyouz MS. Le conteneur du contrôleur de vol de bord.
Toujours à l'avant-garde
L'amarrage d'un vaisseau spatial à une station est l'une des étapes les plus critiques et les plus difficiles du vol spatial. Et, si quelque chose ne se déroule pas comme prévu, cela provoque toujours une inquiétude légitime pour tous les participants au processus.
Des reproches immérités
Le concepteur en chef rappelle plusieurs cas particuliers où les reproches à propos du système étaient infondés.
Un autre incident s'est produit en octobre 2010 lors de l'amarrage du Progress M-08M. L'équipement Kours-P peut assurer l'amarrage à l'un des deux nœuds d'accostage. Au total, il y a trois hubs d'amarrage sur le module de service du segment russe de l'ISS, de sorte que les cosmonautes ont commuté manuellement les câbles du conteneur électronique Kours-P aux antennes du troisième hub d'amarrage. Dans le même temps, il y a eu une perte du signal "Capture" lors du passage au mode "mouillage". L'amarrage à l'étape finale a dû se faire en mode TOROu.
L'analyse de la situation a montré que les cosmonautes ont connecté les antennes des deux nœuds d'amarrage entre eux - et en conséquence, le conteneur électronique a été déconnecté des antennes d'amarrage. Après cela, RKK Energuya a développé un interrupteur électromécanique.
Les aventures du robot Fyodor lors de l'approche et de l'amarrage du vaisseau Soyouz MS-14 à l'ISS en août 2019 sont également liées au facteur humain. Dans cette situation, le câble le reliant à l'une des antennes du site d'amarrage sélectionné.
Fin juillet de cette année, lors du vol épique vers l'ISS du nouveau module "Naouka", un incident s'est également produit, au cours duquel la réputation du "Kours" a été en partie indûment mise en cause. Étant donné que Naouka préparait le lancement depuis longtemps, mais que le lancement a été reporté à plusieurs reprises, le module était équipé d'une version précédente, toujours analogique, du Kours. De plus, à bord, il y avait à la fois un ensemble actif ("Kours-A" - pour l'amarrage à l'ISS) et un passif ("Kours-P" - pour l'amarrage ultérieur de navires ou d'autres modules à la "Science").
"Après s'être mis en orbite sur le module, la perche de l'antenne n°1 ne s'est pas ouverte", partage les détails Sergueï Medvedev. "Les réclamations sur le Kours ont immédiatement commencé à affluer, bien que la barre ait été fabriquée par le fabricant de Naouka et que notre antenne venait d'être installée dessus. Sur la troisième orbite, la barre s'est ouverte, mais les tests ont été reportés. Ce n'est qu'à la troisième tentative qu'ils ont pu envoyer tous les signaux nécessaires au fonctionnement à l'équipement "Kours", et son test a réussi sans aucune remarque. Les contrôles ont également été passés avec succès le jour de l'accostage. Mais lorsque nous avons commencé à entrer en contact avec l'ISS, il a été découvert que Kours-A n'avait pas reçu de signal de la station, bien que l'équipement Kours-P l'ait reçu".
"Il s'est avéré qu'une atténuation accrue du signal s'est formée dans le chemin d'alimentation de réception, qui ne fait pas partie du "Kours". Néanmoins, le vaisseau a convergé selon les prévisions. Sans le "Kours" il est impossible de se rapprocher de l'amarrage "manuel". Enfin, le signal a commencé à apparaître et il est devenu clair que notre équipement, bien qu'avec une atténuation supplémentaire dans le trajet de réception, est toujours opérationnel. Ensuite, tout s'est bien passé. Malgré le fait que la trajectoire d'approche a beaucoup changé, même l'ancien "Kours" analogique fonctionnait comme une horloge."
Les problèmes survenus au stade de l'amarrage du vaisseau spatial Soyouz-MS-19 avec l'équipe de tournage du film "Challenge" étaient associés à des inexactitudes dans l'interaction du système de contrôle du vaisseau avec un équipement "passif", appelé "Kours-MKP ". Il s'agit d'un nouveau « passif » numérique. Il n'a été livré à l'ISS que cet été et a été récemment installé sur le bloc cargo fonctionnel Zarya au lieu de l'analogue Kours-P. C'était son premier amarrage. La commande émise par le système de contrôle du vaisseau, comme il s'est avéré plus tard, a fait sortir le Kours-MKP du mode d'amarrage. C'est pourquoi le commandant du vaisseau, Anton Shkaplerov, a dû recourir au TOROu, c'est-à-dire au dit "amarrage manuel".

L'image classique obtenue par la caméra d'un vaisseau se rapprochant de l'ISS.
Les systèmes radio restent pertinents (Questions à Sergueï Medvedev):
- Sergueï Borisovich, quelles sont les particularités de l'opération Kours au stade actuel du vol de la Station spatiale internationale ?
- L'ISS a une configuration très complexe : des modules, d'énormes panneaux solaires, des fermes forment une sorte de réflecteurs d'angle. Cela conduit au fait que le signal envoyé par l'engin spatial actif pénètre dans l'antenne de l'ensemble passif à la fois directement et réfléchi par les éléments structurels de l'ISS. Des signaux parasites sont générés qui déforment les paramètres mesurés. Les "parasites" peuvent provoquer des fluctuations notables du niveau du signal reçu, jusqu'à des creux en dessous du niveau de sensibilité du système - et alors nous perdons la "capture".
C'est le plus grand fléau pour nous. C'est avec les "parasites" qu'ils se sont battus au stade de l'utilisation d'Igla, en installant des radioprotections sur les vaisseaux. Mais alors, les objets qui s'approchaient étaient de configuration relativement simple, ce qui ne peut pas être dit de l'ISS moderne. Les éléments de structure n'entraient alors pas dans les diagrammes de rayonnement des antennes du système de mesure mutuelle.
- Sur quels systèmes avancés travaillez-vous actuellement ?
- Aujourd'hui, notre équipe crée un système fondamentalement nouveau pour le rendez-vous et l'amarrage des engins spatiaux - à la fois sur des orbites proches de la Terre et dans l'espace lointain, par exemple, près de la lune. Le nouveau système pour le vaisseau spatial "Orël" a intégré les meilleurs développements utilisés dans les dernières modifications du "Kours": il sera plus léger, plus compact et pourra supporter les charges de rayonnement. Dans le même temps, les principes de fonctionnement sont quelque peu différents, mais il s'agit également d'un système radio.
- On sait que les vaisseaux étrangers (Dragon, Cygnus et HTV) sont équipés de complexes qui différent du "Kours" en termes de fonctionnement. Que pouvez-vous dire sur ces systèmes ?
- Les Américains et les Japonais utilisent la « triade » : les signaux du système de navigation par satellite GPS sont utilisés à longue distance ; puis GPS relatif - c'est la même chose, mais avec correction différentielle; à courte distance, le système d'identification de la lumière, de détection et de détermination de la distance LIDAR. Nous avons également commencé à utiliser le système GLONASS. Pour déterminer la perspective, nous essayons également maintenant d'utiliser "l'optique", créant un système lidar à balayage. Cependant, l'optique, en règle générale, détermine la vitesse radiale en différenciant la plage, et la précision de sa détermination diminue.
Pour le cargo européen ATV, nous avons réalisé il y a plusieurs années une version de l'équipement Kours, qui contrôle l'approche en termes de portée et de vitesse. Ainsi, "Kours" a mesuré la vitesse avec beaucoup plus de précision, le système de mesure de ce "cargo" européen a donné une grande erreur dynamique.
De toute évidence, il n'y aura pas autant de constellations de satellites de géolocalisation en orbite lunaire et planétaire qu'aujourd'hui en orbite proche de la Terre, ce qui signifie que la navigation mondiale ne fournira pas la précision requise. Par conséquent, les systèmes radio restent pertinents.
Dans un avenir plus lointain, nous devrons nous amarrer à des objets « non coopératifs » - des satellites, à l'origine non destinés à l'amarrage, aux fins de leur maintenance, réparation ou information depuis l'orbite. Nous travaillons déjà sur de tels systèmes.
Source et crédits photographiques et graphiques: Roussky Kosmos/Roscosmos