
Kikina et le robot…

Contrôle à distance du robot anthropomorphe Skybot- F850.
Le samedi 16 juillet 2022, la cosmonaute de Roscosmos Anna Kikina a participé aux travaux de recherche Sozvezdie-LM (Constellation-LM). Elle a agi en tant qu'opératrice du robot anthropomorphe SKYBOT F-850. Dans l'exosquelette, Anna contrôlait à distance les mouvements du robot, qui devait franchir un certain itinéraire dans un véhicule le long d'une trajectoire définie par la cosmonaute.
Le but de l'expérience Sozvezdie-LM est d'évaluer la possibilité de réaliser des activités complexes d'opérateur après un vol spatial.
Ceci est particulièrement important dans le cadre des préparatifs de l'exploration prospective des surfaces de la Lune, de Mars et d'autres objets du système solaire. Les spécialistes doivent analyser comment les facteurs d'apesanteur affectent la capacité d'une personne à se déplacer, à contrôler l'équipement et à effectuer diverses tâches. Pour ce faire, ils ont sélectionné un certain nombre d'opérations qui sont effectuées avant et après le vol.
Selon les résultats de l'expérience, en plus d'évaluer les actions des cosmonautes, les spécialistes du Centre émettent des propositions d'amélioration des équipements, des combinaisons spatiales, des commandes, etc.
À la fin de la semaine, les membres de l'équipage principal de l'ISS-68, Sergueï Prokopyev et Dmitry Peteline, participeront également à ces travaux.
Source et crédits photographiques: TsPK/Roscosmos

Le robot est lui sur le rover.

Anna Kikina a enfilé son exosquelette de contrôle. Ici elle n'utilise qu'un bras de même que le robot.

Casque de réalité virtuelle requis pour voir ce que le robot voit.
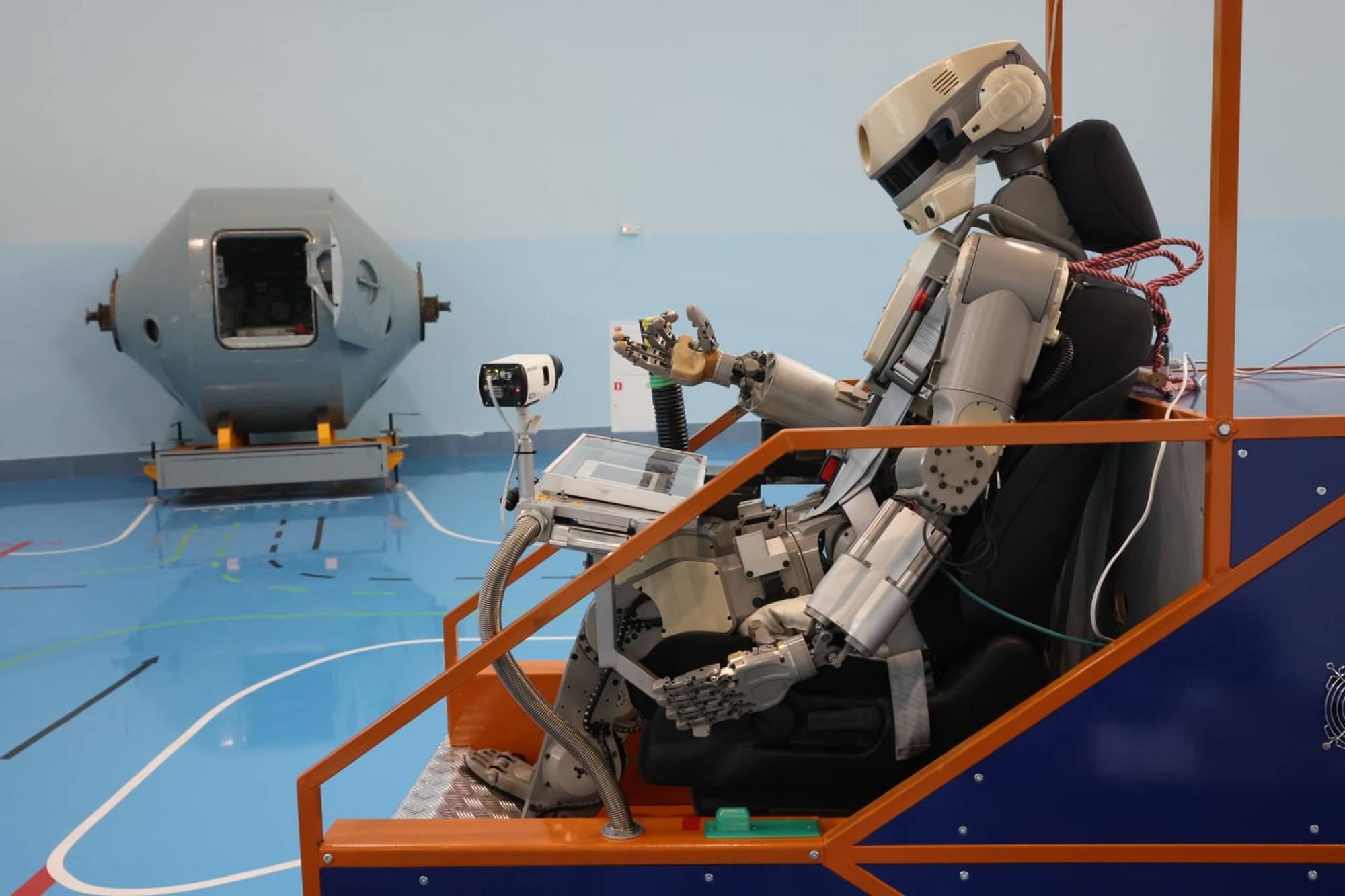
Skybot F850 aux commandes du rover.

Skybot F850 aux commandes du rover.

Anna Kikina et SkyBot F850 sur le rover.
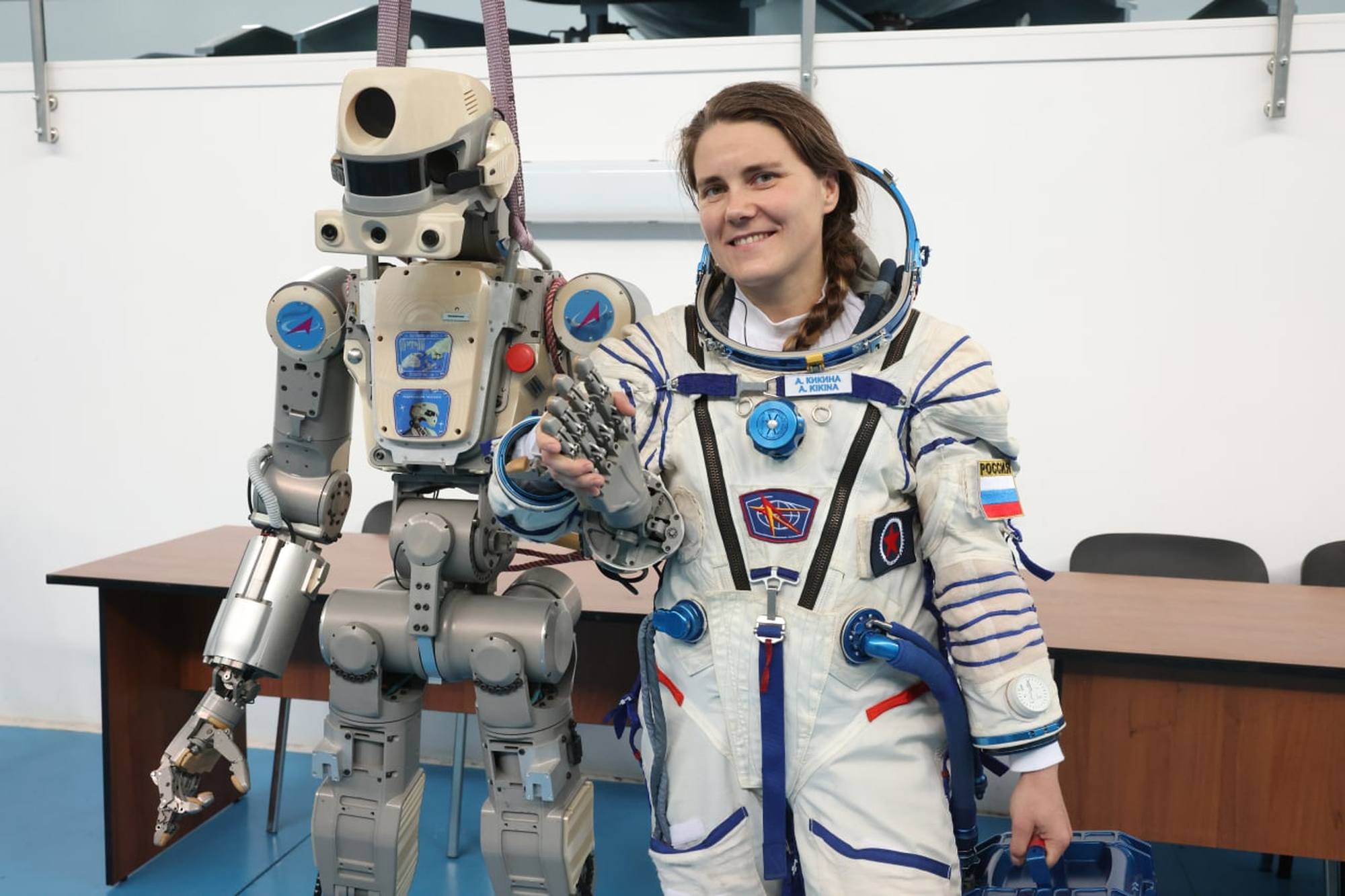
Anna Kikina et SkyBot F850.

Et maintenant l'enregistrement pré-vol des capacités de Kikina à piloter le rover.

Les tests se déroulent sur la piste tracée dans l'enceinte de la centrifugeuse du TsPK.