
ERA installé sur Naouka

Avant toute chose il faut placer les logos sur Naouka car le bras robotique ERA sera replié sur leurs emplacements. Un travail de couturière...
Ça y est enfin, le bras robotique européen est installé sur le module Naouka, après tant d'années d'attente dans les locaux d'Energuya.
Au cosmodrome de Baïkonour, le programme d'essais de contrôle du module de laboratoire Naouka du segment russe de la Station spatiale internationale est en cours d'achèvement.
Dans l'atelier n°104 du bâtiment d'assemblage et d'essais (MIK KA) du site n°254, des spécialistes d'Energuya et de l'Agence spatiale européenne ont achevé les opérations technologiques pour l'installation finale du manipulateur (bras robotique) européen (ERA) sur le corps du nouveau module.
Le manipulateur autonome amovible ERA fabriqué par la société allemande Fokker Space fait partie de l'équipement de maintenance électromécanique standard du module Naouka.
En tant que principal manipulateur du segment russe de la station, il assurera l'installation et le retrait des charges cibles à la surface de la station et la surveillance de l'état de la surface extérieure de la station, ainsi que le mouvement télécommandé des astronautes. sur un poste de travail portable lors des sorties dans l'espace. Conformément au planning de travail, lors de l'installation de l'ERA sur les fixations de transport, un contrôle de haute précision de la position du manipulateur en configuration pliée et des tests complexes des moyens de fixation sur le module ont été réalisés.
Les travaux supplémentaires sur le complexe technique seront menés par des spécialistes d'Energuya et du Yuzhny Space Center (une branche du TsENKI) dans le cadre de la préparation régulière du lancement.
Pendant cette période, il est prévu d'installer des panneaux solaires, de placer la cargaison livrée et de contrôler le pids du module, l'assemblage du composite supérieur avec la coiffe, le ravitaillement des réservoirs du module avec des composants propulseurs et l'assemblage général du lanceur Proton-M.
Lancement prévu à la mi-juillet.
Petit tour en images commentées de l'installation du bras européen sur Naouka.
Sources et crédits photographiques: TsENKI/Roscosmos

Il faut aussi préparer l'emplacement du bras ERA sur Naouka.

Le bras ERA est pour le moment dans son conteneur (en bas sur l'image).

Comme on peut le voir le compartiment d'adaptation au lanceur a été désolidarisé du module après son passage à la chambre à vide.

Ouverture du conteneur du bras ERA.

Le couvercle est soulevé: le bras robotique est bien emballé. Notez à la droite de l'image le système (une sorte de portique) qui va permettre de le soulever et de le positionner sur Naouka.

Le bras est déballé.

Le portique de positionnement du bras ERA: presque aussi complexe que le bras lui-même.

C'est parti pour le déplacement du bras (et de son portique de positionnement).

ERA va rejoindre Naouka.
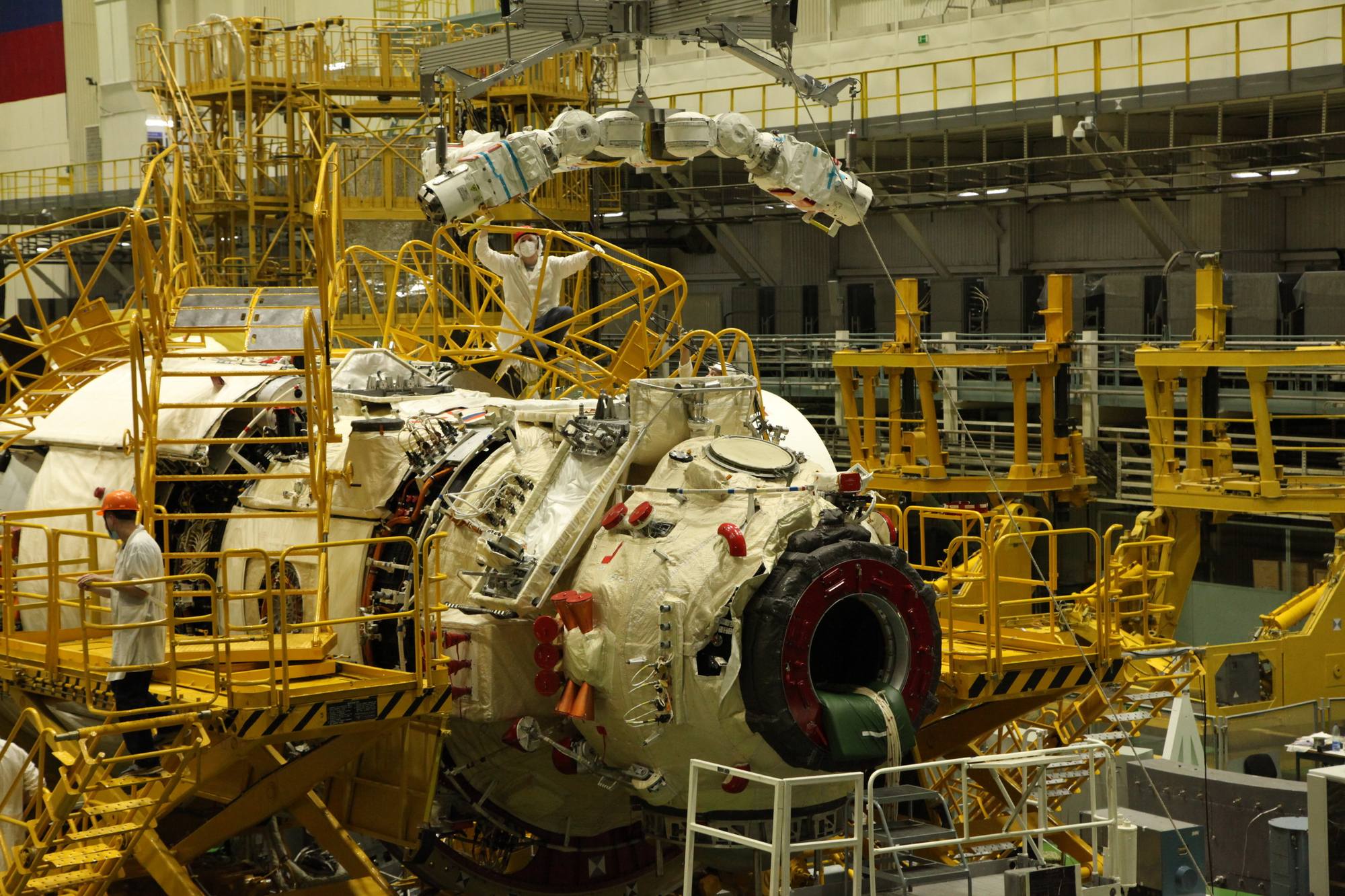
Le bras ERA au-dessus de Naouka.

L'emplacement précis du bras ERA est prévu: il ne doit pas toucher la coiffe.

Un bras de chaque côté pour ERA.

Le bras est positionné et sécurisé sur Naouka.