
Roscosmos montre le prototype du nouveau robot spatial Télédroïde

Teledroïd chez NPO Androidnaya Tekhnika.
La Journée de la robotique est célébrée dans le monde entier le 7 février de chaque année. La robotique est conçue pour aider l'humanité dans divers domaines d'activité : de la médecine à l'espace. Aujourd'hui, Roscosmos publie les premières images du prototype du robot anthropomorphe de nouvelle génération Teledroid et raconte l'histoire de la robotique spatiale.
Le mot "robot" a récemment eu 100 ans. Ce nom a été utilisé en 1920 par l'écrivain tchèque Karel Capek dans sa pièce R.U.R., désignant les ouvriers mécaniques. Du mot tchèque "robot" est traduit par "travailleur qui effectue un travail forcé". Au cours du siècle dernier, les ouvriers mécaniques humanoïdes ne sont pas les seuls à être appelés des robots.
Les robots font depuis longtemps partie intégrante de la vie d'une personne moderne : appareils électroménagers, industries diverses, médecine, transports. Les robots numériques - les programmes, ont commencé à être appelés bots - en tant que dérivé du mot "robot". L'astronautique a toujours été à la pointe des dernières connaissances et évolutions techniques en mécatronique, cybernétique, informatique et électronique. Des robots y sont utilisés depuis le début de l'ère spatiale.
L'un des premiers exemples réussis de systèmes robotiques a été la station interplanétaire automatique Zond-3, qui a été lancée le 18 juillet 1965 à l'aide du lanceur Molniya. Fabriqué en OKB-1 (maintenant RKK Energuya, partie de Roscosmos), passant par le satellite naturel de la Terre, est entré dans l'orbite héliocentrique et a transmis une image du satellite naturel de la Terre prise pendant le vol à différentes distances, jusqu'à plusieurs dizaines de millions de kilomètres, après avoir accompli toutes les tâches assignées. Le travail a été effectué selon un algorithme pré-écrit en mode automatique.
L'étape suivante importante de la robotique spatiale a été le lancement et l'exploitation des premiers rovers planétaires Lunokhod-1 et Lunokhod-2, lancés respectivement le 10 novembre 1970 et le 8 janvier 1973. Ils peuvent difficilement être qualifiés de robots à part entière, car ils ont exécuté des commandes depuis la Terre et n'ont pas agi conformément au programme établi. Le premier d'entre eux - "Lunokhod-1" - a travaillé sur la Lune pendant onze jours lunaires (10,5 mois terrestres) et, commençant son voyage dans la mer des pluies, a parcouru 10,5 kilomètres. Lunokhod a transmis à la Terre plus de 20 000 images, 206 panoramas, 25 analyses aux rayons X de la composition du sol, plus de 500 résultats d'essais physiques et mécaniques du sol à l'aide d'un pénétromètre.
Vega (la comète de Vénus-Halley) est considérée comme le summum des stations spatiales automatiques domestiques - la dernière des sondes interplanétaires lancées par l'Union soviétique. En 1985, deux Vegas ont posé des atterrisseurs et des ballons atmosphériques sur Vénus, puis se sont dirigés vers la comète de Halley, où ils ont d'abord mené des recherches à proximité immédiate du noyau de la comète.
L'un des exemples les plus brillants de la robotique spatiale soviétique était le vaisseau spatial Bourane. Il a effectué le premier et unique vol le 15 novembre 1988 en mode entièrement automatique. À une altitude d'environ 11 km, Bourane, qui avait déjà effectué deux orbites autour de la Terre, a reçu des informations de la station au sol sur le vent dans la zone d'atterrissage et, de manière inattendue pour tout le monde, a effectué un virage supplémentaire pour atterrir contre le flux venant en sens inverse.
En commençant par les premiers vaisseaux habités, les développeurs avaient l'intention d'éliminer le besoin de participation humaine au contrôle. Et si au départ les systèmes du vaisseaux étaient plutôt protégés des interférences du "passager", alors à partir du moment où le premier vaisseau spatial habité "Vostok" a été lancé jusqu'au "Soyouz MS" numérique moderne, un long chemin a été parcouru pour augmenter l'automatisation. Désormais, l'équipage surveille les lectures des instruments et les transmet à la Terre, ne prenant le contrôle qu'en cas d'urgence, testant des équipements ou effectuant des tâches non standard.
Évidemment, des robots sont également présents à bord de la Station spatiale internationale, aidant les cosmonautes et les astronautes. Ainsi, depuis 2001, le robot manipulateur Canadarm2 est en fonction, qui déplace l'équipement et les matériaux sur la surface extérieure de la station et aide l'équipage à travailler dans l'espace. En juillet 2021, un autre manipulateur, ERA, est apparu à la station, qui sera bientôt installé sur le module de laboratoire polyvalent de Naouka. Le manipulateur sera un ajout au manipulateur mécanique manuel Strela, établi de longue date, du segment russe de l'ISS.
En 2019, le premier robot anthropomorphe russe Skybot F-850 est monté à bord de l'ISS dans le cadre de l'expérience Tester. Le vol sur le vaisseau spatial Soyouz MS-14 et d'autres travaux à bord de la station ont montré que des robots anthropomorphes peuvent être intégrés dans des engins spatiaux habités et des stations orbitales pour fournir la fonctionnalité souhaitée. Pourtant, il y a plus de tâches pour les robots à l'extérieur des navires et des stations, dans un environnement agressif pour les humains.
Le travail principal de ces robots consistera à résoudre des problèmes à la surface des corps cosmiques - la Lune, les planètes du système solaire et leurs satellites. Le mode de contrôle de copie [mode avatar - NDLR KN] - la répétition des mouvements d'un opérateur vêtu d'une combinaison spéciale - permettra d'utiliser les capacités intellectuelles d'une personne pour résoudre les tâches les plus complexes, et le mode automatique intelligent prendra en charge les opérations de routine.
Dans le cadre du programme de travail ultérieur, le développeur de Skybot F-850, représenté par NPO Androidnaya Tekhnika, en collaboration avec RKK Energuya, travaille à la création d'un robot anthropomorphe de nouvelle génération, appelé Teledroid. Il sera capable de travailler dans un environnement spatial agressif et d'effectuer des tests expérimentaux d'opérations typiques en mode copie et en mode automatique.
À l'avenir, un tel assistant devrait réduire considérablement le temps nécessaire à une personne pour rester dans un environnement dangereux et faciliter le travail en dehors de la base à la surface de la planète, libérant ainsi l'équipage pour d'autres tâches.
Sources et crédits photographiques et techniques: RKK Energuya/NPO Androidnaya Tekhnika/Roscosmos

Teledroïd chez NPO Androidnaya Tekhnika.

Teledroïd chez NPO Androidnaya Tekhnika.
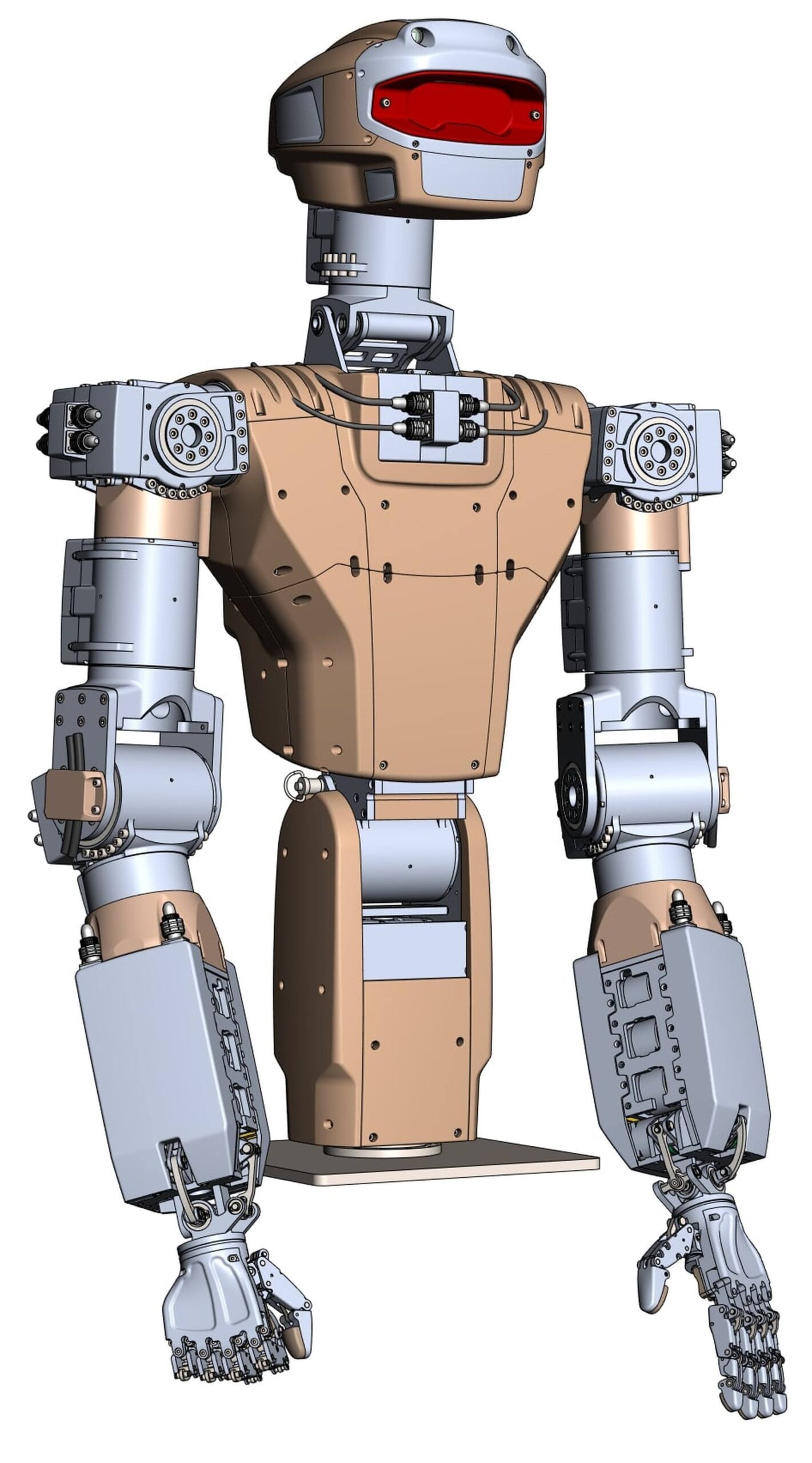
Teledroïd. Notez qu'il s'agit d'un robot "buste" (voir ici)

Teledroïd sous toutes ses coutures en haute définition.