
L’histoire du bras robotique européen ERA installé sur Naouka

L'architecture du bras ERA...en russe.
L'European Robotic Arm (ERA), installé à l'extérieur du module polyvalent "Science", a étoffé l'arsenal d'équipements robotiques de la Station spatiale internationale.
Igor Afanasyev raconte les caractéristiques du manipulateur, ses similitudes et ses différences avec les "collègues" canadiens et japonais dans le magazine " Russian Space ".
Contrôlé via un ordinateur portable
Le "bras" robotique européen ERA, fabriqué par la branche néerlandaise d'Airbus Defence and Space et installé sur le module Naouka, viendra compléter les bras télescopiques du segment russe de la station, qui comprend deux bras manuels Strela, qui étaient auparavant situées sur Pirs, puis déplacés vers les modules Poisk et Zarya.
C'est ERA qui deviendra bientôt le principal assistant cosmonaute mécanisé sur la surface extérieure de l'ISS. Il devra installer, démonter et remplacer des équipements à l'extérieur de la station, y compris en les détachant du module russe Rasviet. C'est notamment avec son aide qu'un sas et un échangeur de chaleur, qui sont donc déjà sur l'ISS, seront installés sur le module Naouka.
Le manipulateur pourra également surveiller l'ISS à l'aide de caméras vidéo et accompagner les astronautes lors d'activités extravéhiculaires.
ERA sera le premier robot capable de "marcher" à l'extérieur du segment russe de l'ISS, c'est-à-dire "marcher" entre les points de fixation sur les modules "Naouka" et "Prichal". Le système de contrôle permet au robot de « marcher » de manière autonome, en se déplaçant d'un point d'attache à un autre.
Le manipulateur, qui a une longueur étendue de 11,3 mètres, se compose de deux longues sections symétriques, reliées par une charnière, et de deux "poignets". Certes, au lieu de brosses, il y a les dits EES (End Effectors) aux extrémités - des éléments que la "main" utilise pour tenir à la station, saisir la cargaison et aider les cosmonautes, y compris les déplacer entre les sites de travail.
Les "articulations" confèrent au manipulateur une très grande mobilité ; il peut atteindre des objets à une distance de 9,7 mètres et transporter des poids de huit tonnes à une vitesse allant jusqu'à 10 cm/sec et avec une précision de positionnement allant jusqu'à 5 mm. Dans ce cas, le poids de la main elle-même n'est que de 630 kg.
Quatre caméras, unités d'éclairage et électronique permettent de contrôler le travail de la "main", et il sera possible de le contrôler aussi bien de l'intérieur que de l'extérieur de la station. Les manipulateurs déjà sur l'ISS n'ont pas de telles capacités.
ERA donnera à l'équipage plus de liberté et de flexibilité dans leurs opérations, a déclaré David Parker, directeur de la recherche sur les systèmes homme-machine à l'Agence spatiale européenne.
Soit dit en passant, la "main" européenne est le seul manipulateur de l'ISS qui peut être actionné manuellement sans utiliser de joysticks. Ses actions sont construites en mode automatique - sur la base de commandes données par les cosmoonautes à partir de panneaux de commande, situés à la fois à l'intérieur et à l'extérieur de la station. En théorie, à l'avenir, non seulement les cosmonautes, mais aussi les opérateurs terrestres pourront transmettre des commandes. Cette option de contrôle n'a pas encore été implémentée.
Charlie Chaplin
Le développement du manipulateur spatial européen a commencé en 1985! [ce qui explique que sur l'une des photos les écrans d'ordinateur sont encore cathodiques]. Fokker Space a mené des recherches pour le programme de mini-navette Hermes, sur lequel travaillait alors l'Agence spatiale européenne. En conséquence, un projet de bras robotique HERA (Hermes Robotic Arm) est apparu - un analogue réduit du manipulateur Canadarm utilisé sur les navettes américaines pour déplacer des marchandises dans l'espace.
Après l'annulation du programme Hermes en 1992, les agences spatiales européenne et russe ont convenu de la possibilité d'installer HERA pour desservir la station spatiale Mir-2 en cours de développement, et le manipulateur a reçu son nom actuel ERA. C'est alors qu'un ordinateur de contrôle et deux nouveaux panneaux de contrôle ont été ajoutés au "bras" - un pour le cosmonaute dans l'espace ouvert, l'autre pour l'équipage à l'intérieur de la station.
Avec l'annulation du projet Mir-2 et le début des travaux sur l'ISS, le projet a été adapté au segment russe de la station internationale, au sujet duquel un accord correspondant a été signé. Au fur et à mesure que la configuration du segment a été modifiée, le manipulateur dans les dessins « a erré » de module en module. La conception à grande échelle a commencé en 1998 en collaboration avec la plate-forme scientifique et énergétique russe (NEP), un module qui devait initialement être fabriqué. La première mission de l'ERA aurait été d'installer des panneaux solaires. La plateforme devait être lancée en 2001 sur la navette américaine, puis le lancement a été reporté à 2002. Après la décès de "Columbia" (01/02/2003), il a été reporté sine die, puis le projet NEP a été complètement annulé.
En 2004, les travaux reprennent : il est décidé d'installer ERA sur le module, qui sera plus tard nommé « Naouka ». Un accord correspondant fut à nouveau conclu avec les Européens. Les tests de l'un des modèles de manipulateur ont commencé dans des conditions simulant l'apesanteur. La structure attachée à la maquette du module Naouka a été immergée dans l'eau dans l'hydro-laboratoire du TsPK, où les cosmonautes se sont entraînés avec elle.
En plus du modèle ci-dessus, deux autres ont été utilisés pendant les différents tests. Le premier était de déterminer la conformité géométrique de l'ERA avec les gabarit de la coiffe au lancement, le second était de tester sa résistance aux vibrations dans la configuration de lancement.
En 2005, l'ESA a signé un contrat avec Airbus Defence and Space pour préparer l'ERA au lancement avec Naouka sur une fusée Proton-M en novembre 2007. En février 2006, des équipements pour entraîner les astronautes à travailler avec le manipulateur sont arrivés en Russie. Entre-temps, le lancement de Naouka a été reporté à plusieurs reprises, et avec lui la livraison d'une copie de vol de l'ERA à la Russie a été reportée. De plus, le développement de la "main" s'est également déroulé non sans problèmes techniques et logiciels. Ce n'est qu'en mai 2020 que l'ERA est arrivée à Baïkonour, et un an plus tard, le manipulateur a été installé sur Naouka.
Lors de son lancement en juillet de cette année, l'ERA était attaché la section de petit diamètre du module dans une configuration appelée "Charlie Chaplin" : les segments d'épaule sont parallèles et adjacents les uns aux autres, et les deux effecteurs terminaux, en revanche, sont écartés. comme les bouts des chaussures du grand comédien. Les segments mobiles du "bras" étaient fixés avec des crochets spéciaux à la surface de la "Naouka". Les cosmonautes les libéreront en allant dans l'espace en début d'année 2021.
Shiva à plusieurs bras
ERA est loin d'être le seul manipulateur à bord de l'ISS. La station est équipée de plusieurs autres « bras » robotiques qui remplissent des fonctions similaires.
Le premier, et le plus célèbre, est le système de service mobile Canadarm2 du segment américain. Il se compose de trois parties : un chariot de base mobile, un bras de levage et une pince Dextr à deux mains pour les travaux délicats à l'extérieur. Le système peut être déplacé sur des rails à l'aide d'un chariot.
Il est assez difficile de comparer le Canadarm2 et l'ERA, car ils diffèrent sensiblement par leurs tâches et leurs capacités, bien qu'ils soient similaires en apparence.
Ainsi, le Canadarm2 est beaucoup plus grand (la longueur maximale est de 17,6 m), plus puissant (capable de manipuler des objets pesant jusqu'à 116 tonnes, par exemple une navette) et plus lourd (poids propre - 1170 kg). Ce manipulateur sert, entre autres, à « agripper» et à amarrer les modules de l'ISS et les navires de différents pays ne disposant pas d'un système d'amarrage actif. Dans le même temps, les deux « mains » peuvent « voyager » indépendamment le long de la surface de la station d'un point à un autre, effectuer de la maintenance et de l'inspection, déplacer des charges et également aider les personnes lorsqu'elles travaillent dans l'espace.
Les "poignées" Canadarm2 n'étant pas compatibles avec celles du segment russe, elles ne peuvent pas être utilisées sur les modules russes, à l'exception du Zarya. Ainsi, en raison de la différence d'interfaces, le Canadarm2 ne peut fonctionner qu'avec le segment américain et ERA uniquement avec le segment russe.
Contrairement au manipulateur entièrement automatique ERA, le Canadarm2 peut être utilisé soit par un astronaute à bord de l'ISS, soit par un opérateur au sol au siège de la NASA.
Le module Kibo est équipé d'un manipulateur japonais JEM-RMS (Japanese Experiment Module, the Remote Manipulator System), qui utilise les mêmes poignées que le Canadarm2. Ce "bras" est utilisé exclusivement pour les travaux sur le module japonais : il servait principalement aux plateformes de chargement et de déchargement pour l'exposition des échantillons et cargaisons scientifiques arrivant dans le "cargo" automatique HTV "Konotori".
Ainsi, ERA complétera harmonieusement la famille de manipulateurs robotiques de l'ISS, augmentant la fonctionnalité du segment russe. Les tâches principales de la "main" pour la première année de travail à la station spatiale : installation d'un gros radiateur et d'un sas sur le module "Naouka", ainsi que l'installation d'un poste de travail mobile.
En perspective
Le chef du centre de vol spatial de RKK Energuya, Alexander Kaleri, a déclaré que trois sorties dans l'espace seraient nécessaires pour installer le manipulateur ERA. Ils seront suivis par les spationautes européens Matthias Maurer et Samantha Cristoforetti. Ils arriveront à l'ISS en octobre de cette année et en avril de l'année prochaine, respectivement.
Lors des sorties russes en janvier 2022, les cosmonautes retireront les capots thermiques et les retenues du robot. À l'avenir, le manipulateur sera testé et mis en service.

L'une des premières versions du bras (H)ERA. Au look des ordinateur on voit que l'histoire d'ERA est longue.

Samantha Cristoforetti s'entraînant sur un simulateur de l'ERA.
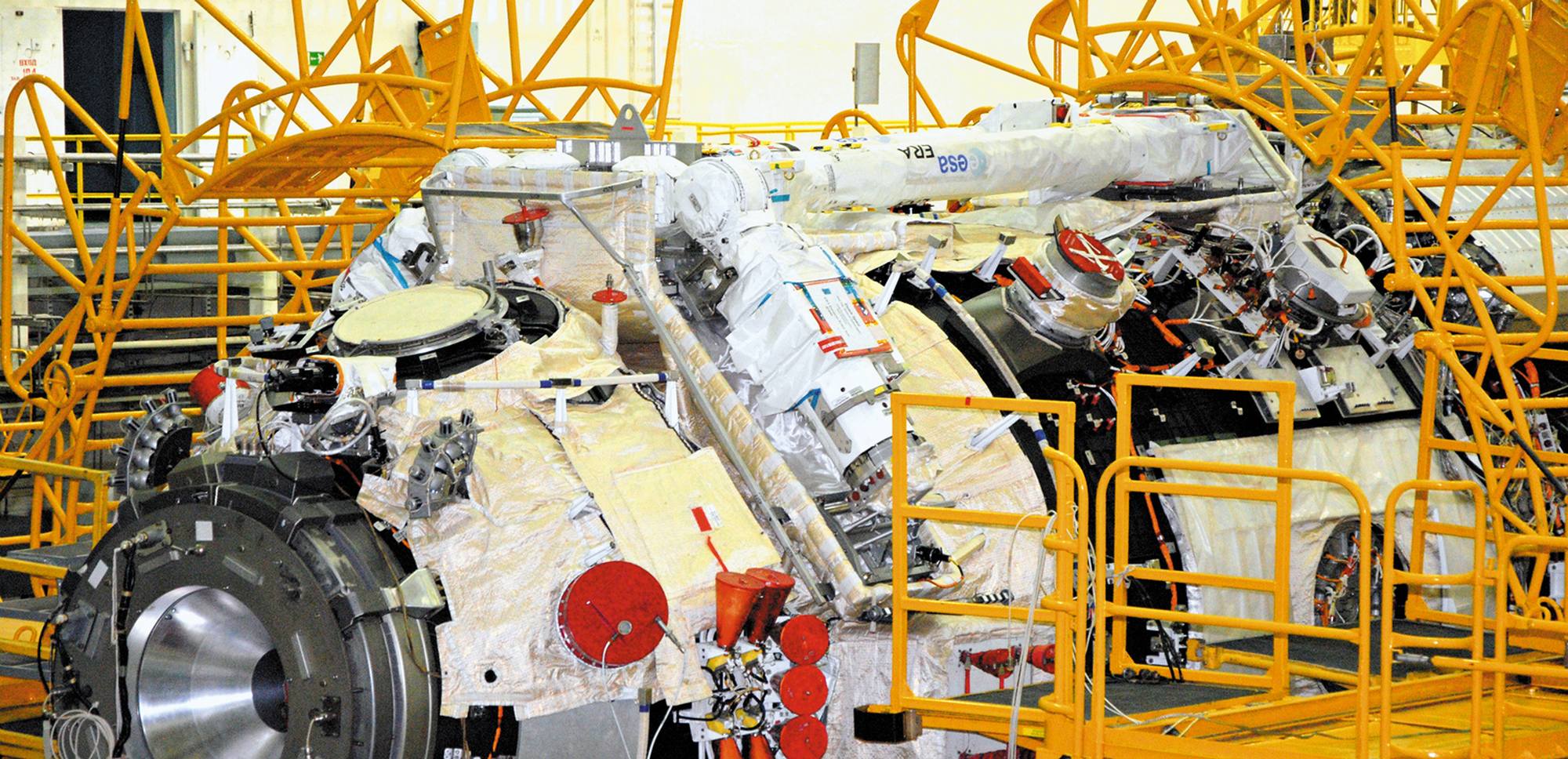
Le bras ERA installé sur le module Naouka.