
Expériences d’interaction homme-robot anthropomorphique au TsPK
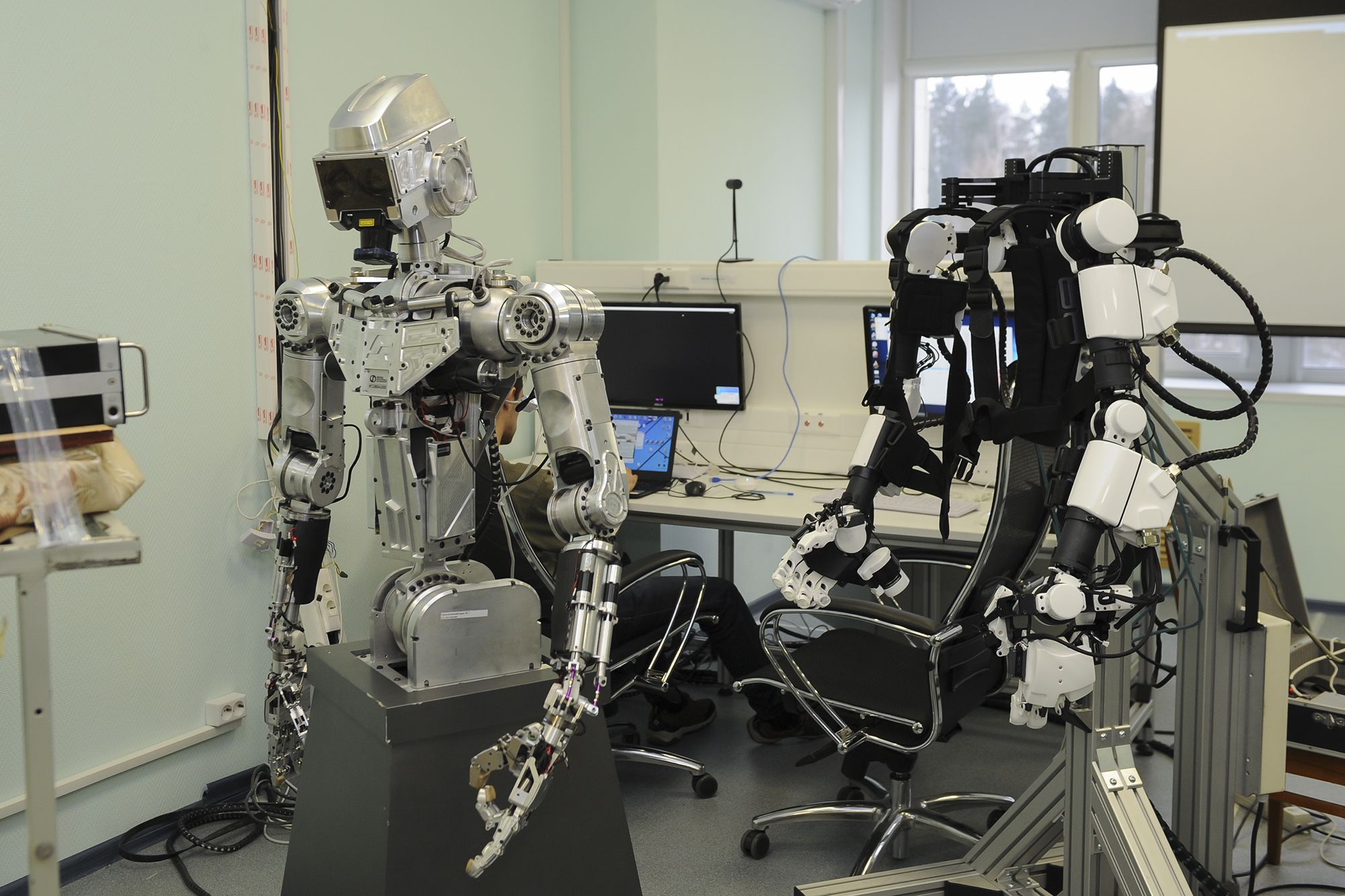
Le robot anthropomorphique avec derrière lui l'équipement (exosuelette) que portera l'homme qui le contrôle.
Une série d'expériences avec un robot anthropomorphique se sont déroulées (conclues le 8 février) au TsPK (Centre de préparation des cosmonautes). Il s'agissait de tester l'interaction entre le robot et l'homme.
Il s'agit ici d'une configuration "télé-opérateur" c'est-à-dire que c'est l'homme qui, à l'aide des images de réalité virtuelle fournies par le robot, commande les mouvements et les gestes du robot. En effet cette configuration est extrêmement importante pour une utilisation dans l'espace: la première utilité du robot sera de réaliser des tâches dans des environnements hostiles: vide spatial autour de stations, exploration de surface de planètes hostiles, etc... En effet on comprend facilement que les sorties dans l'espace sont à la fois très risquées et épuisantes pour les cosmonautes, par exemple ceux de l'ISS. Pour certaines tâches la commande de l'activité d'un robot depuis l'intérieur de la station serait bien plus efficace et sécurisée. Plus encore, il est tout-à-fait envisageable de commander l'action d'un robot depuis l'orbite d'une planète (Lune, Mars...) sans la nécessité d'y poser un équipage humain: si la distance depuis la Terre (Mars...) implique de mettre de côté la commande directe depuis la Terre, celle depuis l'orbite ne devrait pas poser de de problème.
Encore faut-il que que le robot agisse avec suffisamment de précision et que le cosmonaute puisse apprendre les gestes (acquérir une certaine dextérité) pour commander le robot.
C'est donc ce qui a été testé au TsPK. Le robot qui n'est qu'à moitié anthropomorphique (il n'a pas de jambes, mais dans l'espace les jambes ne sont pas forcément utiles!), a eu deux tâches à réaliser: d'une part fixer un élément sur un rail comme ceux qu'on trouve sur l'extérieur de l'ISS, et d'autre part pousser des boutons sur un appareil électronique.
Dans un premier temps, le cosmonaute n'a pas utilisé la réalité virtuelle, regardant directement le travail à faire, puis dans un second temps il a chaussé le casque de réalité virtuelle et réalisé les opérations au travers des images envoyées par le robot à son casque. Pour réaliser les commandes, le cosmonaute porte une sorte d'exosquelette et fait les gestes comme s'il faisait lui-même le travail, l'exosquelette envoyant au robot les informations de ses propres mouvements.
On sait que les russes souhaitent dans les toutes prochaines années envoyer un robot anthropomorphique dans un soyouz inhabité: si nécessaire le robot commandé depuis la Terre pourrait appuyer sur les commandes du tableau de bord du Soyouz. Plus encore, ils souhaitent mettre à l'extérieur du segment russe de l'ISS un tel robot qui serait donc commandé depuis l'intérieur.
Participaient à cette expérience 6 cosmonautes dirigés par Oleg Novitsky (le très expérimenté cosmonaute d'origine biélorusse), dont en particulier Sergueï Kud-Sverchkov (un cosmonaute qui n'a pas encore volé).
Le robot (du doux nom de Fedor) est développé par la société "Androïdnaya Technika"
Source et crédits photographiques: TsPK
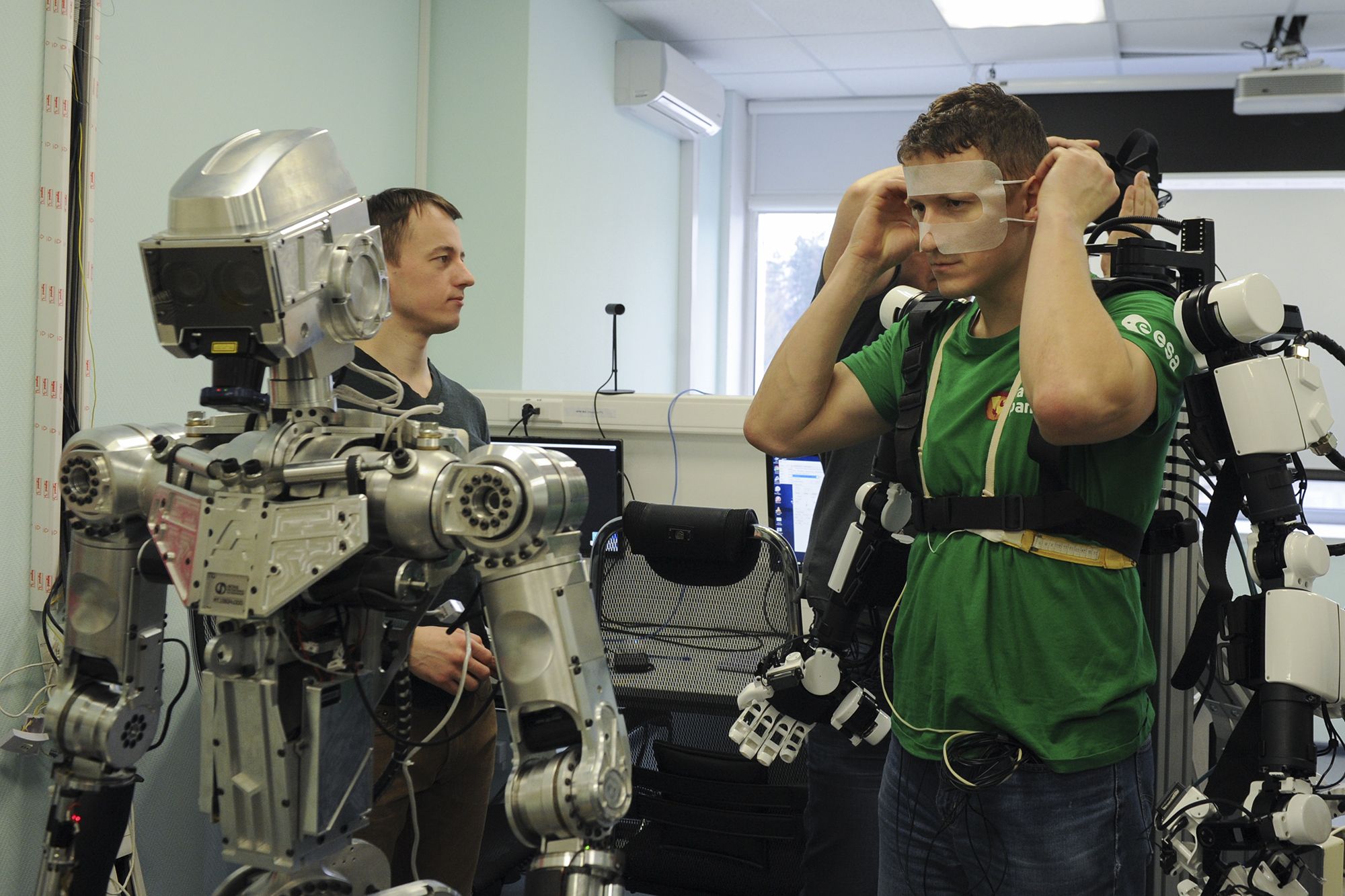
Sergueï Kud-Sverchkov mettant en place l'exosquelette.

Tâche du robot: fixer un élément au rail extérieur.
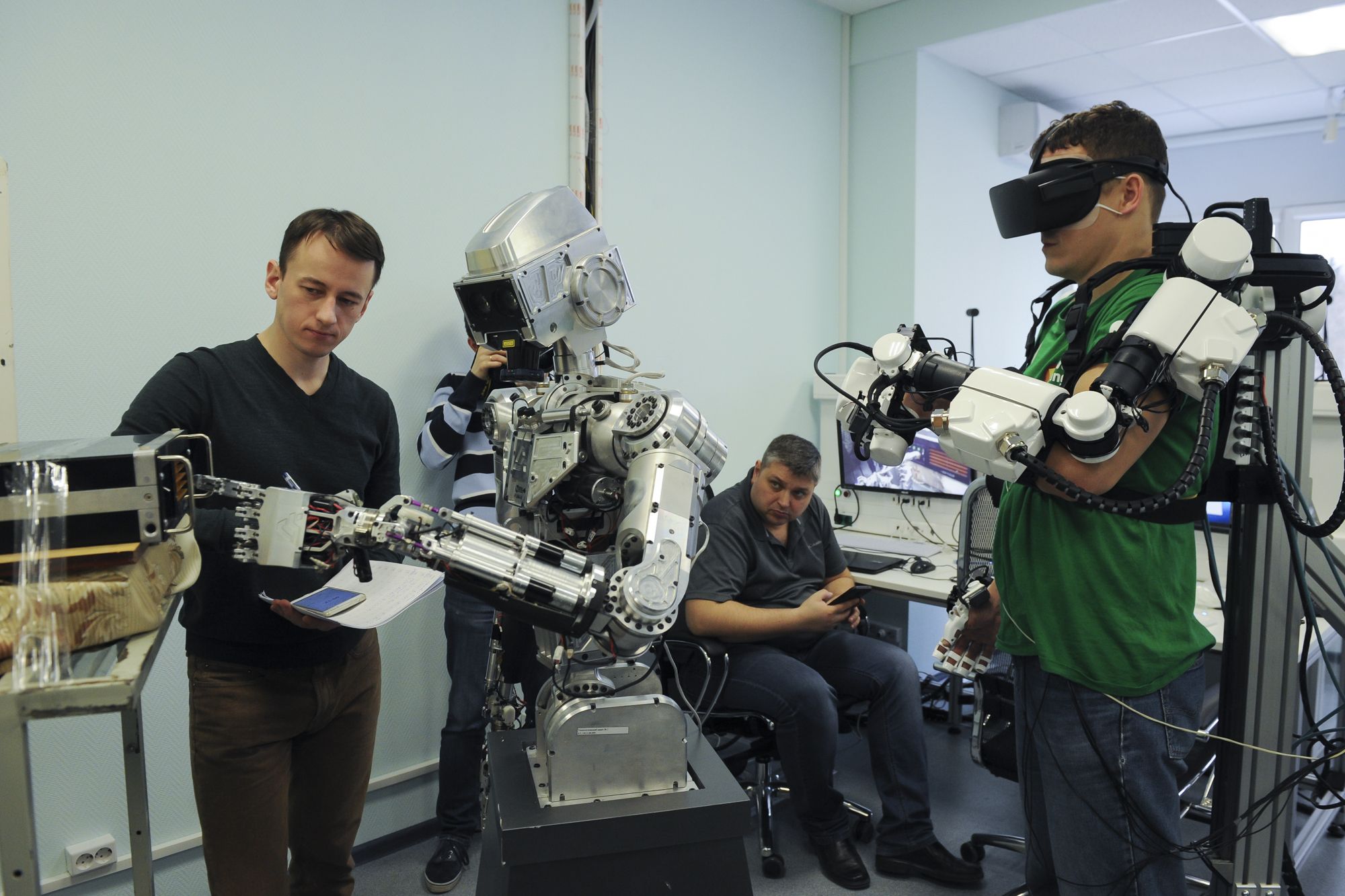
Cette fois-ci il faut de la dextérité: enclancher un bouton sur un appareillage.