
Systèmes Kours et TOROu: un peu d’explication
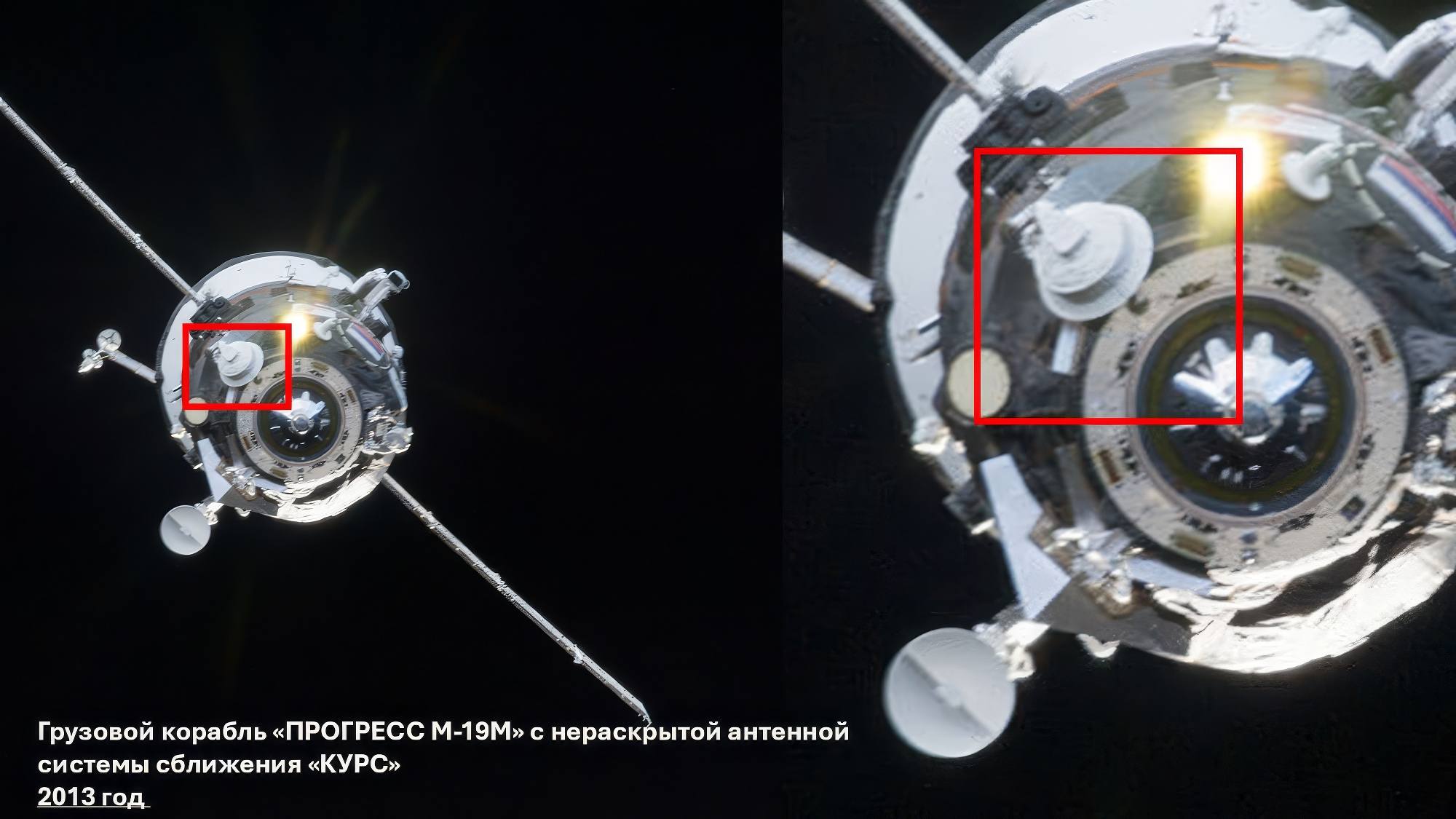
L'antenne qui ne s'est pas déployée, ici photographiée sur Progress M-19M en 2013. Comme on peut le voir le cadre circulaire de l'antenne déborde légèrement sur la pièce d'amarrage.
Roscosmos a confirmé que l'amarrage à l'ISS sera réalisé en mode manuel.
Le 24 mars, le cosmonaute Sergueï Koud-Svertchkov amarrera le vaisseau cargo Progress MS-33 à la Station spatiale internationale (ISS).
« L'amarrage manuel à l'ISS est une procédure courante pour les cosmonautes lors de leur entraînement en vue de leurs missions ; il s'agit d'une opération simple », a commenté Oleg Kononenko, directeur du Centre d'entraînement des cosmonautes.
Selon le Groupe principal de contrôle des opérations de vol du segment russe de l'ISS, après le lancement du vaisseau cargo Progress MS-33, l'une des antennes du système KOURS est restée non-déployée.
Cette antenne sert à l'amarrage automatique du vaisseau à l'ISS.
Des spécialistes surveillent les paramètres de vol du vaisseau et préparent l'amarrage du Progress MS-33 lors de la phase finale du rendez-vous, grâce à la téléopération manuelle [Système TOROu] effectuée par les membres d'équipage du segment russe de l'ISS.
Il y a déjà eu des cas où l'antenne ne s'est pas déployée sur commande après la séparation du vaisseau spatial et du lanceur ; l'amarrage a néanmoins eu lieu, manuellement ou automatiquement.
Le système Kours, embarqué sur les vaisseaux Soyouz et Progress, calcule la position angulaire et la vitesse du vaisseau par rapport à la station. L'équipement de ce système se trouve à bord du vaisseau lui-même, tandis que son homologue est situé sur le segment russe de l'ISS.
Ce système est activé bien avant l'amarrage et, si les paramètres mesurés par l'ordinateur de bord et le système Kours correspondent, le rendez-vous automatique se poursuit jusqu'à l'amarrage à l'ISS.
En 2013, la même antenne ne s'est pas déployée sur le Progress M-19M, mais cela n'a pas affecté les mesures de distance et de vitesse ; la décision d'amarrer a donc été prise.
Un lecteur attentif remarquera que l'antenne, une non-déployée, chevauche une partie du cadre de l'unité d'amarrage, où se trouvent de nombreux connecteurs.
Cependant, des tests menés au sol, puis confirmés dans l'espace, ont démontré que l'écrasement de l'antenne lors du contact ne compromet ni l'étanchéité ni l'intégrité du module d'amarrage.
De plus, il est possible de piloter le vaisseau spatial cargo depuis l'ISS grâce au système TOROu, ce qui a d'ailleurs été réalisé pour le Progress M-19M par les cosmonautes spécialistes de RKK Energuya, A.Yu. Kaleri et M.V. Serov.
En 2008, cette même antenne a été déployée sur le Progress M-01M lors de sa troisième orbite, après les opérations dynamiques et la phase de préchauffage. [KN: en effet la température ou des vibrations sont susceptibles de débloquer l'antenne d'ici le rendez-vous. On remarquera quand même que le système devrait être amélioré pour une fiabilité plus élevée].
Espérons donc que tout se déroulera comme prévu pour les deux prochains jours de vol. Il est fort probable que le mode de téléopération (TOROu) permettant de contrôler le cargo avec l'aide des cosmonautes ne soit pas nécessaire.
Sources: Roscosmos et Dobry Ovtchinnikov; Crédits photographiques: Roscosmos avec adaptation de Dobry Ovtchinnikov
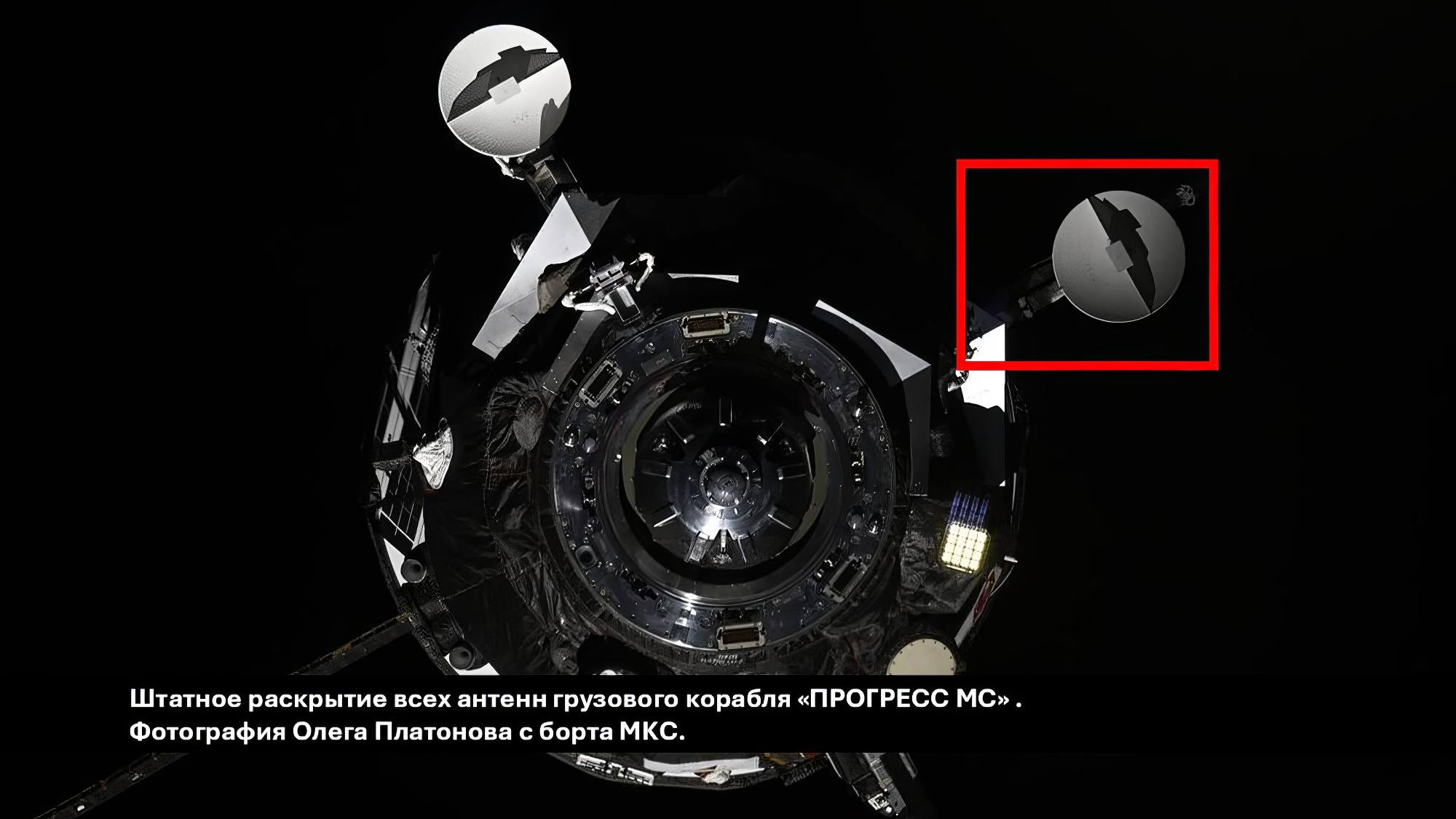
L'antenne en position déployée, ici sur un Progress MS, photographiée par Oleg Platonov depuis l'ISS.
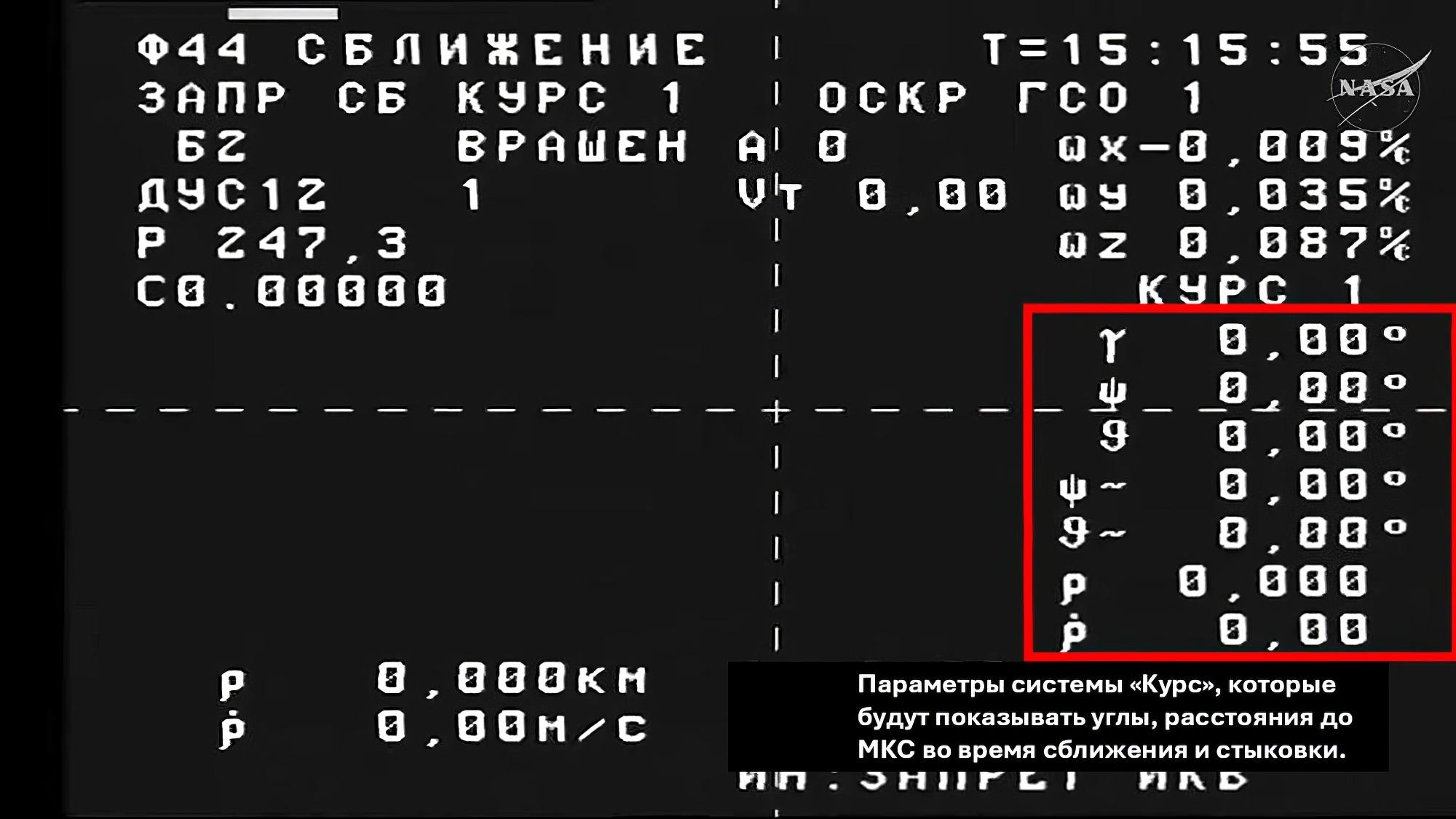
Lorsque le système Kours ne fonctionne pas les données (tout est à zéro dans le cadre rouge) n'apparaissent pas sur l'écran du système.

Sergueï Prokopyev et Oleg Artemyev utilisant le système TOROu pour réaliser un arrimage manuel (téléopération) d'un cargo Progress depuis l'intérieur de l'ISS.